stm32通过iic读取mpu6050数据
”iic_mpu6050 stm32_mpu6050 mpu6050_stm32 stm32__i2c_mpu6050“ 的搜索结果
stm32 模拟IIC 读出mpu6050的六轴原始数据,串口显示
这里提供官方的运动处理驱动库,分别需要用到“inv_mpu.h”、“inv_mpu.c”、“dmpKey.h”、“dmpmap.h“、“inv_mpu_dmp_motion_driver.h”、“inv_mpu_dmp_motion_driver.c”等六个文件。6、设置MPU6050的数字低通...
【代码】STM32F103硬件IIC与MPU6050通信,附代码详解。
采用了硬件i2c1,读取挺快的,hal库移植很方便,可以很快地移植到f4等平台
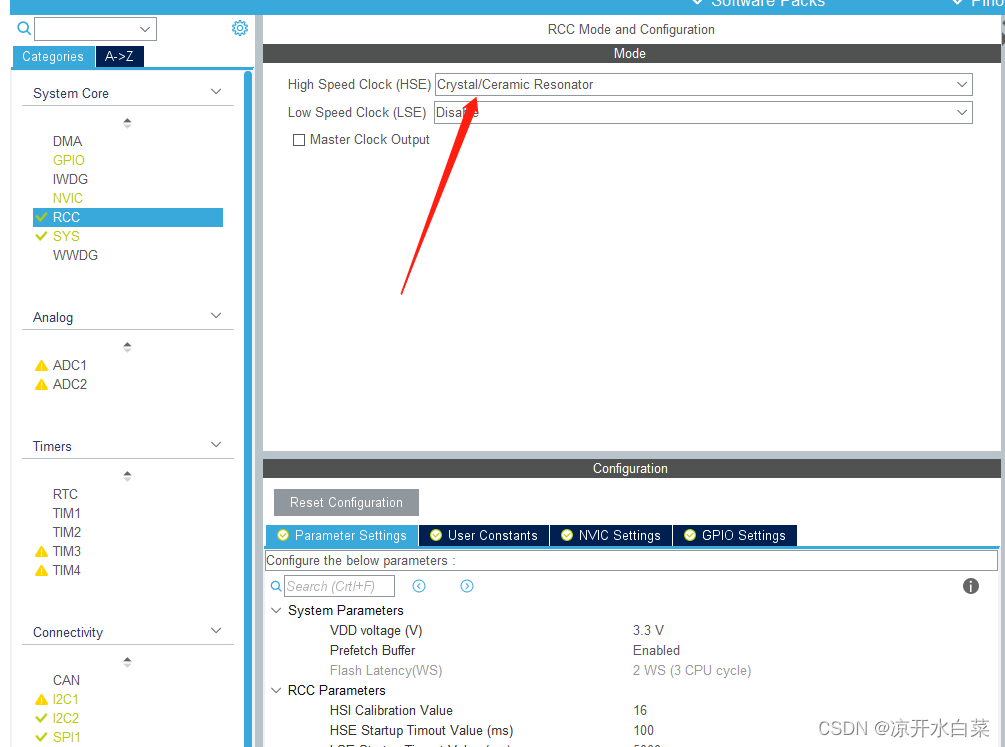
通过STM32 Cubermx 实现 硬件I2C对MPU6050的操作,包括DMP的移植,程序代码注释详细,有部分程序代码摘录于正点原子的函数, 基于STM32F407ZG 芯片开发
《XR806开发板试用》硬件IIC驱动MPU6050
STM32总结超全笔记【秋招自用】
I2C1通道可选择三种不同的通讯协议:I2C、SMBus-Alert-mode、SMBus-two-wire-Interface。 SMBus (System Management Bus,系统管理总线), 为系统和电源管理这样的任务提供了一条控制总线,SMBus与I2C总线之间在时序...
mpu6050_iic_delay():用于控制IIC读写速度的延时函数。 mpu6050_iic_start():产生IIC起始信号。 mpu6050_iic_stop():产生IIC停止信号。 mpu6050_iic_wait_ack():等待IIC应答信号,返回值表示应答信号是否接收...
I2C通信分为主机和从机主机就是拥有主动控制中心的权利,而从机只能在主机允许的情况下才能控制总线,在一主多从的模型下,就是这样,这个是唯一的主机,下面这里可以挂载多个从机等等,那这个过程就很容易操作了,...
芯片进行I2C通信的从机地址,这个可以在手册里查到,当AD0等于0,地址为1001000,当AD0等于1时,地址为1001001,AD0就是板子引出来的一个引脚,可以调节I2C从机地址的最低位,这里地址是七位的。如果像这样用二进制...
qt i2c MPU6050,用于i2cUI界面编写
MPU6050 是 全球首款整合性 6 轴运动处理组件,免除了组合陀螺仪与加速器时之轴间差的问题。内部整合了 3 轴陀螺仪和 3 轴加速度传感器,可以使用 InvenSense 公司提供的运动处理资料库,非常方便的实现姿态解算,...
再将这些文件的.h文件包含进去,iic软件部分要修改的地方只有一处,再文件最上方,改一下你定义的引脚就可以,不需要在主函数里面再初始化了,因为刚才cubemx配置的时候,gpio已经被初始化,这段代码的可移植性非常...
IIC详解
用于配置I2C开启对应的I2C外设产生起始条件产生终止条件控制是否有应答发送数据用于寻找从机地址状态检测函数,用于检查I2C通讯过程中产生的事件状态检测函数,用于获取状态寄存器中的标志位。
本文尝试使用STM32 F103C8T6通过IIC通信驱动MPU6050,文章提供源码、原理讲解、实践操作与结果截图,测试工程下载。
你的支持,我的动力;祝各位前程似锦,offer不断,步步高升!!!经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!**[外链图片转存中…(img-rk9JCG76-1712385810319)]...
使用HAL库软件模拟I2C协议以读取MPU6050传感器中的数据,使用STM32F407ZGT6核心板。首先对串口进行初始化,使用PB5和PB6两个引脚进行模拟。通过设置引脚为上拉、开漏输出模式,并根据江协科技的案例进行封装,实现了...

本文提供了模拟 IIC 详细源代码、注释以及调用方法。

mpu6050_write_byte函数用于向MPU6050的指定寄存器写入单个字节的数据。mpu6050_get_accelerometer函数用于获取MPU6050的加速度值。mpu6050_read_byte函数用于读取MPU6050指定寄存器的单个字节数据。mpu6050_get_...
mpu6050_write_byte(uint8_t addr, uint8_t reg, uint8_t dat): 向MPU6050指定寄存器写入一字节数据的函数。mpu6050_read_byte(uint8_t addr, uint8_t reg, uint8_t *dat): 读取MPU6050指定寄存器的值的函数。MPU...
使用IIC读取,MPU6050。
STM32基于STM32CubeMX硬件I2C驱动MPU6050读取数据
硬件IIC读取MPU6050
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地